沈阳诺德尔自动化科技有限公司
Shenyang Ndeer Automation Technology Co., Ltd
Shenyang Ndeer Automation Technology Co., Ltd

联系人:谢经理
手 机:18640057795(v同步)
邮 箱:xs@syndeer.com
地 址:http://www.ndeeryy.com
网 址:沈阳市沈河区长青街35号
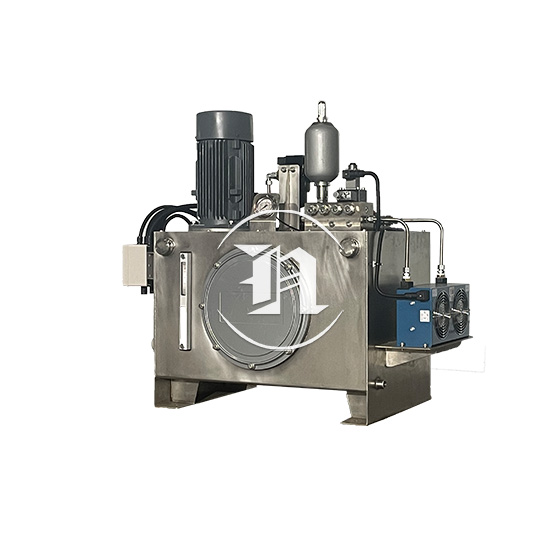
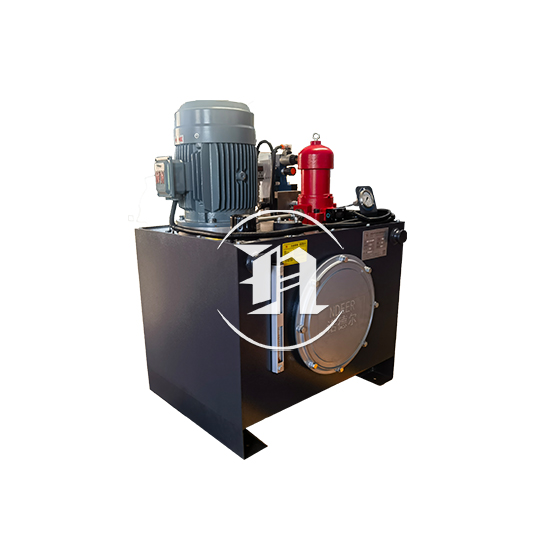
城市轨道交通车轮液压系统(以主流的液压制动系统为例)的工作原理是通过液压能的传递与控制,驱动制动执行部件(如制动夹钳)产生摩擦力,实现列车减速或停车。
1. 动力转向架(被动式液压制动系统)
非制动状态:
被动式液压单元中的二位二通电磁阀处于关闭状态,液压泵输出的高压液压油通过管路进入制动夹钳。此时,液压油压力压缩夹钳内的被动式弹簧,使制动闸片与制动盘保持分离(制动夹钳张开),车轮可自由转动。
制动状态:
当制动指令发出时,电子控制单元(ECU)控制二位二通电磁阀开启,液压油通过回油管路流回油箱,制动夹钳内的液压压力消失。被动式弹簧在自身弹力作用下复位,推动制动闸片合拢并夹紧轴式制动盘,通过闸片与制动盘之间的摩擦力转化为制动力,迫使车轮转速降低,实现制动。

2. 拖车转向架(主动式电子液压制动系统)
常用制动与紧急制动:
主动式系统由电子制动控制单元(EBCU)直接控制,通过比例压力阀等元件对液压回路进行闭环控制。
制动时,EBCU 根据列车速度、载荷、制动指令等级(如司机操作指令、ATP 自动防护指令)计算所需制动力,向液压控制单元发送电信号。
液压控制单元中的比例阀根据电信号调节液压油压力,高压油通过管路进入制动夹钳,推动活塞带动闸片夹紧制动盘,产生与需求匹配的摩擦力(制动力)。
制动力的大小与液压油压力成正比,通过持续监测压力反馈信号,系统可实时调整液压输出,确保制动力稳定、线性可控。
防滑控制:
系统集成防滑传感器(监测车轮转速),当检测到车轮滑行(转速低于列车实际速度)时,ECU 立即控制液压回路减压,减少制动力,避免车轮抱死;待车轮恢复正常转速后,再重新增压,循环调整以保证制动效率与行车安全。