沈阳诺德尔自动化科技有限公司
Shenyang Ndeer Automation Technology Co., Ltd
Shenyang Ndeer Automation Technology Co., Ltd
联系人:谢经理
手 机:18640057795(v同步)
邮 箱:xs@syndeer.com
地 址:http://www.ndeeryy.com
网 址:沈阳市沈河区长青街35号
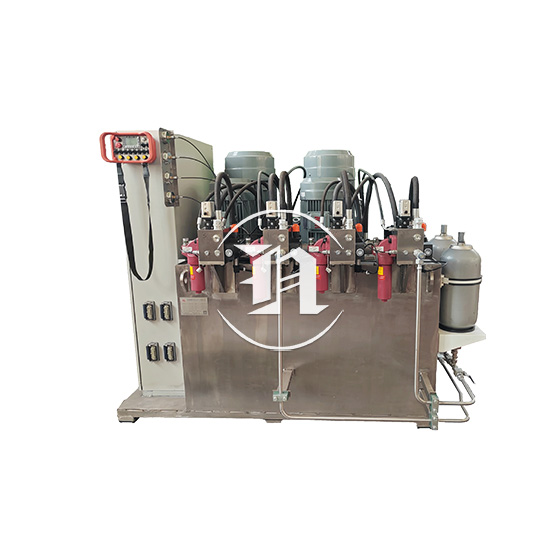
排土机是露天矿开采中的关键设备,主要用于将剥离的岩土排弃到指定地点,其液压系统作为核心动力传输与控制系统,对设备的稳定性、作业效率和可靠性起着决定性作用。
一、排土机液压系统的组成
排土机液压系统通常由以下几个核心部分构成,各部分协同工作以实现设备的不同动作:
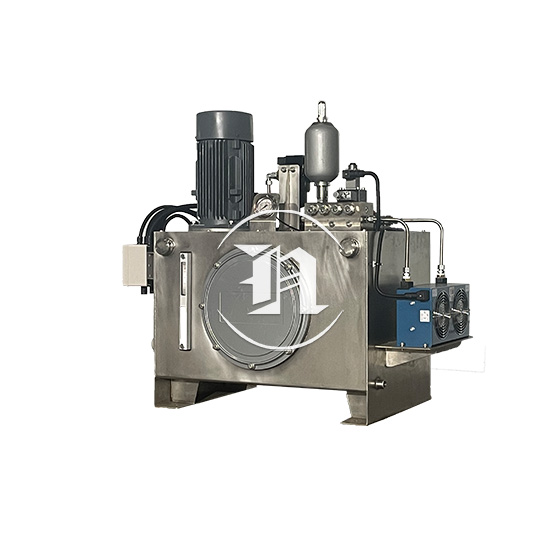
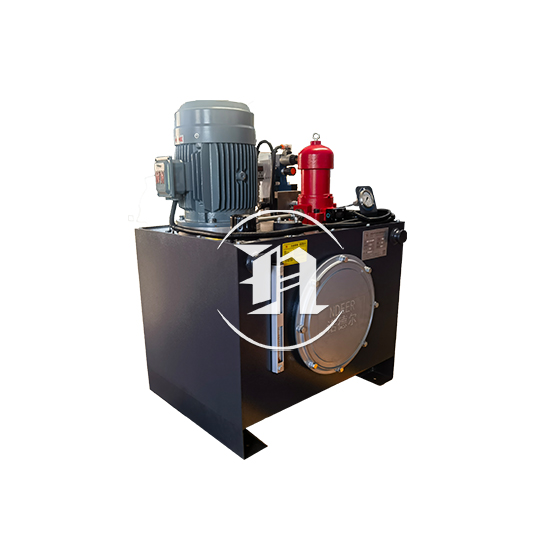
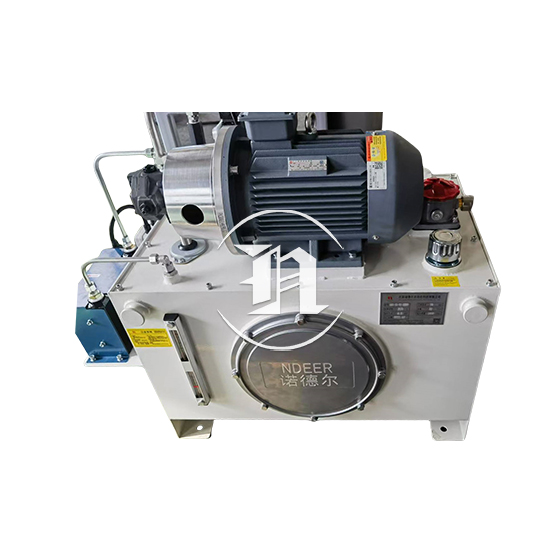
动力元件
液压泵:为系统提供压力油,常见类型包括柱塞泵(高压、大流量,适用于重载工况)、齿轮泵(结构简单,多用于低压辅助系统)。
驱动电机:带动液压泵旋转,提供机械能。
执行元件
液压缸:实现直线运动,用于驱动排土机的臂架俯仰、回转支撑、卸料臂伸缩等动作。
液压马达:实现旋转运动,用于驱动回转机构、带式输送机的驱动滚筒等。
控制元件
方向控制阀:如换向阀,控制液压油的流向,实现执行元件的启停和运动方向切换。
压力控制阀:如溢流阀(限制系统最高压力,防止过载)、减压阀(为局部回路提供稳定低压)。
流量控制阀:如节流阀、调速阀,控制液压油的流量,调节执行元件的运动速度。
比例阀 / 伺服阀:在自动化程度高的系统中,通过电信号精确控制压力和流量,实现动作的精准调节。
辅助元件
油箱:储存液压油,同时起到散热、沉淀杂质的作用。
过滤器:包括吸油过滤器(防止大颗粒杂质进入泵)、回油过滤器(过滤系统中的污染物),保证油液清洁。
冷却器:防止液压油因长时间工作温度过高,影响系统性能(多采用风冷或水冷方式)。
管路与接头:传输液压油,要求耐压、抗振动、密封性能好。
蓄能器:储存压力油,在系统需要瞬时大流量时补充油液,稳定压力波动。
工作介质
液压油:常用抗磨液压油,需根据工作环境温度、系统压力选择合适黏度(如 L-HM 46 号液压油),具备抗磨、抗氧化、抗乳化等性能。

二、排土机液压系统的工作原理
排土机液压系统的工作原理基于帕斯卡定律,通过液压油的压力能转化为机械能,驱动设备动作,以典型的臂架俯仰系统为例:
动力传输:电机带动液压泵从油箱吸油,将机械能转化为液压能(压力油),泵输出的高压油经管路输送至系统。
动作控制:
当需要臂架抬起时,换向阀切换至相应位置,高压油进入俯仰液压缸的无杆腔,推动活塞伸出,臂架绕铰接点向上转动;有杆腔的油液经换向阀流回油箱。
臂架下降时,换向阀改变油流方向,高压油进入有杆腔,活塞缩回,臂架在自重作用下下降。
系统中的溢流阀设定最高压力,若臂架负载过大(如卡滞),压力超过设定值时溢流阀开启,油液回流油箱,保护系统安全。
速度与力的调节:
通过调节流量控制阀的开口大小,控制进入液压缸的油液流量,从而调节臂架俯仰速度。
系统压力由负载决定(如臂架重量、岩土阻力),但最大压力受溢流阀限制,确保液压元件不超载。
三、排土机液压系统的特点
高压大流量:排土机作业时负载重(如臂架长度可达数十米,卸料量巨大),液压系统压力通常在 20-35MPa,流量可达数百升 / 分钟,以提供足够的驱动力。
多执行元件协同工作:需同时控制臂架俯仰、回转、卸料臂伸缩、带式输送机驱动等多个动作,系统需具备复杂的油路设计和同步控制能力。
可靠性要求高:露天矿作业环境恶劣(粉尘、振动、温度变化大),液压系统需具备抗污染、耐高压、长寿命的特点,避免因故障导致停产。
自动化与智能化:现代排土机液压系统多集成传感器(压力、位移、温度传感器)和 PLC 控制系统,实现实时监控、故障预警及动作的精准调节(如根据负载自动调整压力)。